Alberto De Luca
Welcome to my portfolio web page.
Driven by curiosity, with more to come.
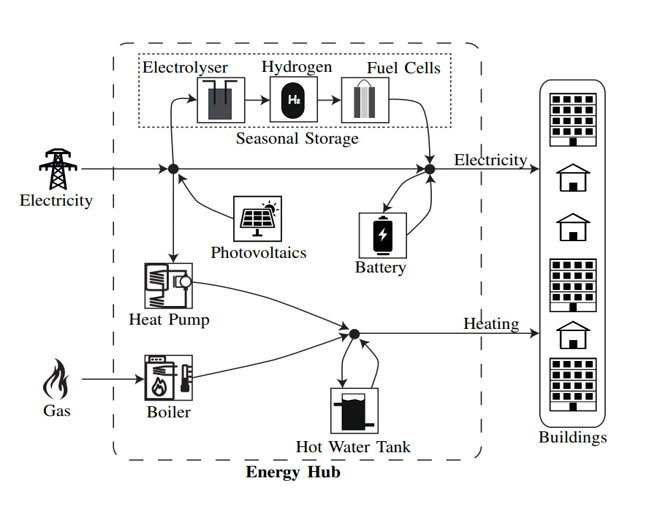
I developed meta-learning algorithms for data-driven Model Predictive Control (MPC), with a focus on robust adaptation under model degradation and changing environmental conditions for MPC regulated Energy Dispatch problems. The approach combines Learning MPC with differentiable optimization to exploit local sensitivities of the optimal control solution with respect to system parameters. By differentiating through the MPC optimization problem, I enabled gradient-based updates of value-function components, allowing lightweight offline value-function adaptation. I demonstrated the effectiveness of the proposed algorithms through extensive simulation studies in Python, using CVXPY for modeling, CVXPYLayers for differentiable optimization, and JAX for automatic differentiation. This work is currently being finalized and will be published.
Implemented federated learning algorithms for financial time-series forecasting, focusing on privacy-preserving collaboration under data heterogeneity and client variability. The framework applies Federated Averaging to train shared LSTM classifiers for binary volatility prediction without sharing raw data. Performance was systematically evaluated against centralized and single-agent baselines under IID and non-IID data, client heterogeneity, differential privacy, and personalization scenarios. Extensive simulations showed that federated learning approaches centralized performance while significantly outperforming isolated local models. The framework was implemented in Python using PyTorch and the Flower federated learning framework. This work has been accepted for publication at Computing Conference, London, July 2026.

Developed a transfer-function model of a Quanser Qube-Servo 2 from experimental step and sinusoidal data using time- and frequency-domain analysis. Designed a proportional feedback controller meeting stability, transient, and disturbance-rejection requirements via Bode and Nyquist methods. Validated the controller on both a digital twin and the real system using MATLAB/Simulink.

Student-led project of the Automation Engineering Association at Polimi ◦ Developed real-time control software for microcontrollers in C++, and performed system modeling and simulation in MATLAB/Simulink.
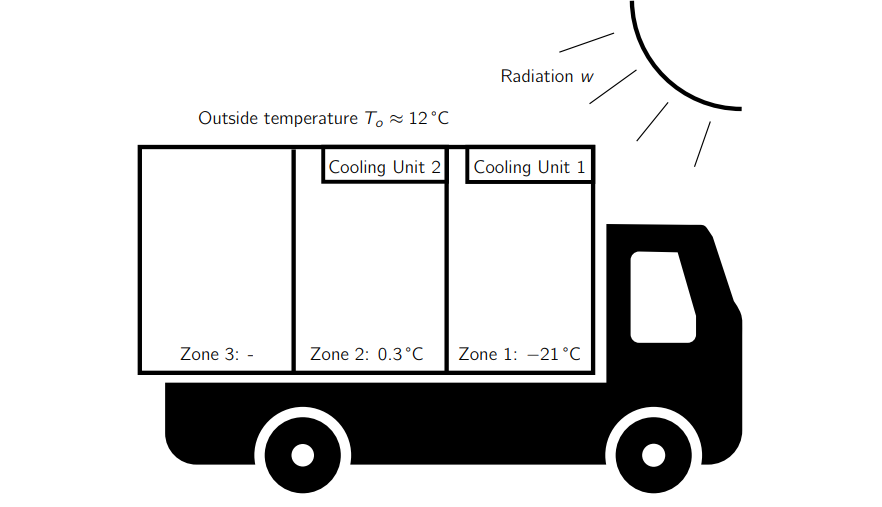
Developed a full control framework for temperature regulation in a delivery truck with three thermal zones and strict food-safety constraints. Modeled the thermal dynamics, designed LQR and multiple MPC controllers (constrained, terminal, soft-constrained, and tube-based robust MPC), and ensured constraint satisfaction under disturbances. Implemented and validated the controllers in MATLAB/YALMIP through closed-loop simulations and robustness analysis.